Sphinx
Catalogs:
Overview
A gripping hand that gives robots the ability to handle more complicated movements with greater ease and efficiency than traditional hands. Typically, robots use a gripper paired with a wrist that has three degrees of freedom: roll (rotating front to back), pitch (side to side), and yaw (vertical movement). But these wrists are mechanically complex and often positioned far from the object being held, forcing the robot to move its entire arm to make adjustments. The result is awkward, inefficient motions that also take up more space. The Sphinx has a spherical mechanism can both grasp and rotate objects along all three axes, combining much of the functionality of a traditional wrist and gripper into a single, streamlined design.
Tags
-
No tags applied
Developed by
Yale University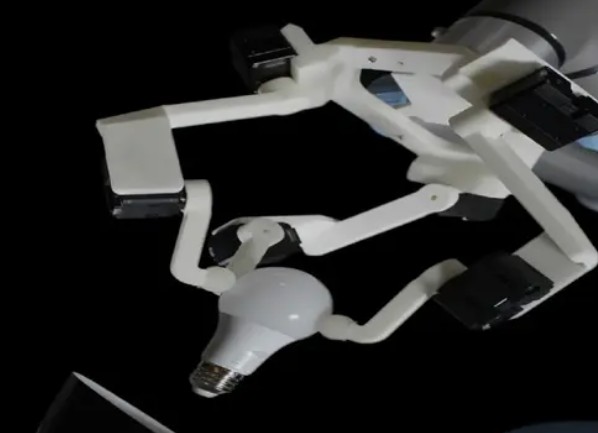

Author: Ian Seed
Created: 2025-09-01 Modified: 2025-09-01
●
Offline