Loris
Catalogs:
Overview
A wall climbing robot equipped with microspine grippers that is suited to ascending non-smooth wall. This has fully passive grippers and wrist joints that allow secure grasping while reducing mass and complexity. Forces are distributed among the robot's grippers using an optimization-based control strategy to minimize the risk of unexpected detachment.
Tags
- Wall Climber
Developed by
Carnegie Mellon University (CMU)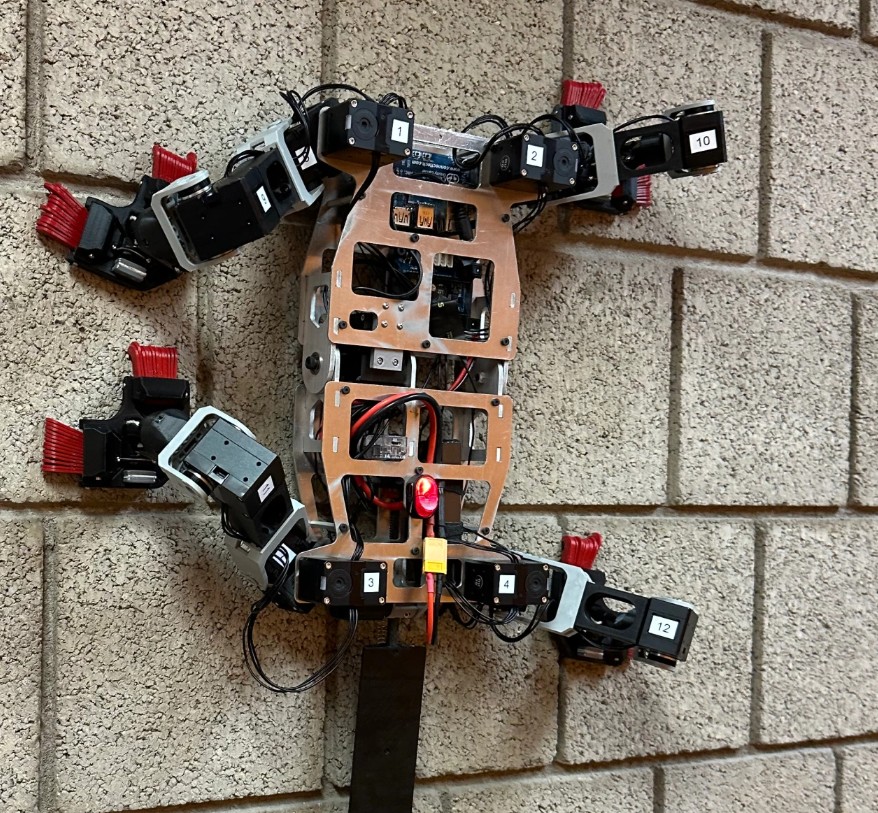

Author: Ian Seed
Created: 2025-09-08 Modified: 2025-09-08
●
Offline