R1
Catalogs:
Overview
A product derived from Project Rembrandt, this is used for control of humanoid robotic hands. It blends active force-feedback, precise force control, millimeter-level accuracy and precision in finger tracking, and vibrotactile feedback.
Tags
- Haptic Glove
Developed by
SenseGlove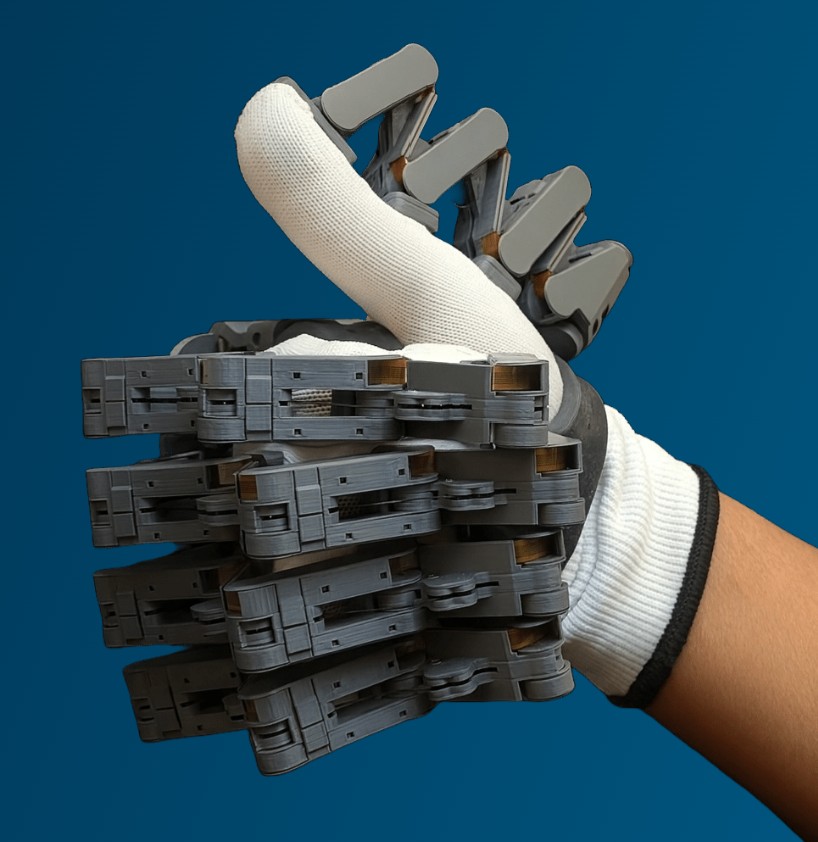

Author: Ian Seed
Created: 2026-01-14 Modified: 2026-01-14
●
Offline