Detachable Robotic Hand
Catalogs:
Overview
A dual-thumbed, reversible-palm design that can detach from its robotic arm to reach and grasp multiple objects by crawling, spider-like, to grasp and carry objects beyond the arm’s reach. The reversible design means the ‘back’ and ‘palm’ of the robotic hand are interchangeable. The concept uses ‘loco manipulation’ - stationary manipulation combined with autonomous mobility - inspired from nature where many organisms have evolved versatile limbs that seamlessly switch between different functionalities like grasping and locomotion. For example, the octopus uses its flexible arms both to crawl across the seafloor and open shells, while in the insect world, the praying mantis use specialized limbs for locomotion and prey capture.
Tags
- Biomimicry
- Robotic Hand
Developed by
EPFL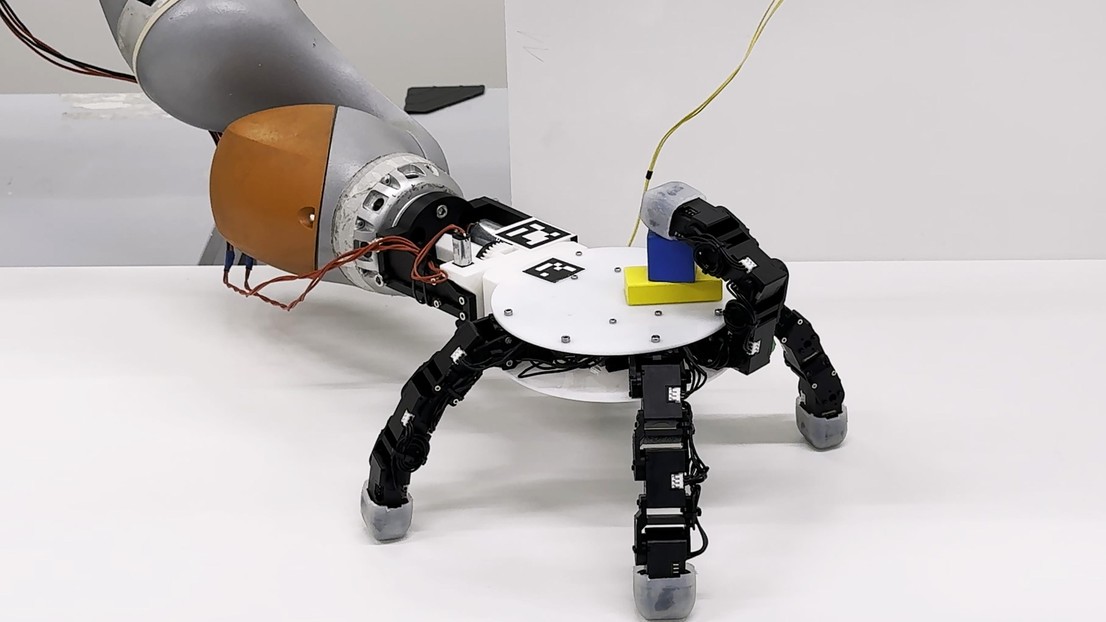

Author: Ian Seed
Created: 2026-01-22 Modified: 2026-01-22
●
Offline